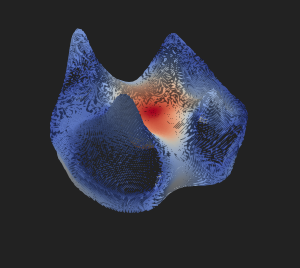
In Visualisation 1, the deformation can be visualised as distance map:
In this case, the orientations are not represented. For representing the orientations, we can render the displacements as vectors:
Then, the result is confusing due to the amount of data.
We can keep the local maxima: